
Evolving Robot Bodies and Brains
A Computer Science Honours project investigating the impact of a complexity cost and environmental complexity on artificially evolved robots
Talk to us
No meetings are currently scheduled.
An open question for both natural and artificial evolutionary systems is how, and under what environmental and evolutionary conditions complexity evolves. The arrow of complexity hypothesis posits that the most complex products of open-ended evolutionary systems tend toward complexity over time. This study investigates the impact a cost on overall robot complexity has on the complexity and fitness of morphology-controller couplings co-evolved for locomotion using novelty and objective search approaches over a range of increasingly complex environments. The novelty search experiment found that an energy cost imposed on complex robots during fitness evaluation had no statistical effect on the populations evolved in almost all simulation environments when compared to populations evolved without such a cost on complexity. The objective search experiment found that the imposition of a complexity cost evolves less complex, equally performing robots across environments of both low and high complexity versus robots evolved without a cost.
Videos
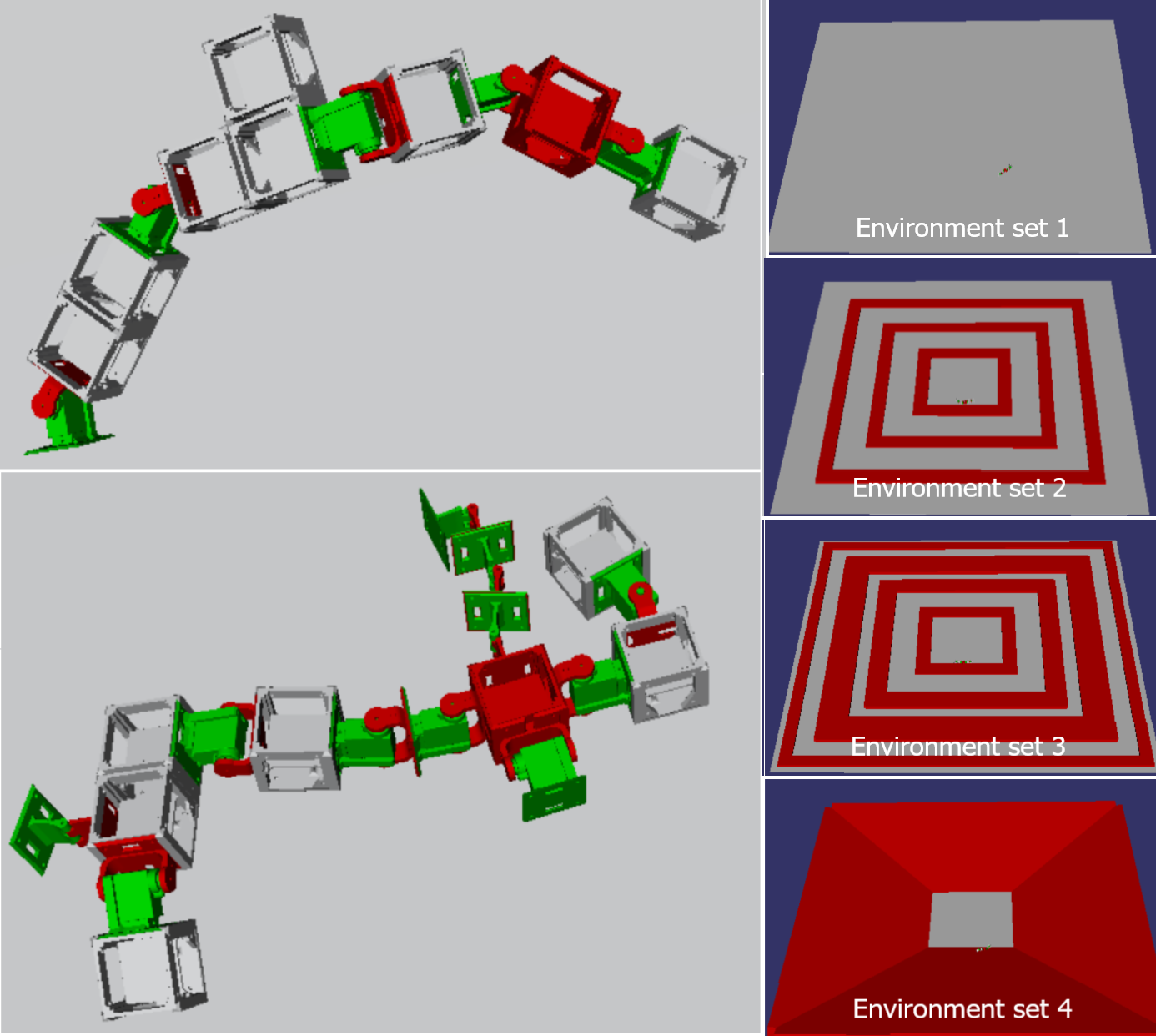
Images