VR Scaled Haptic Props
Two new immerisive haptic controllers for Virtual Reality
Talk to us
No meetings are currently scheduled.
Humans can perceive the shape and weight of a held object using what is known as dynamic touch. This does not rely on vision but rather on the haptic experience of holding an object. Users can estimate the size and shape of an object by its feel and weight distribution. The moment of inertia is the key factor in an object's perceived size, therefore distributing the mass away from the user's wrist can make a small object appear much larger or longer.
The haptic experience provided by current VR controllers does not match the virtual objects they are trying to represent. Interactions with heavy or light, big or small objects all feel identical with current controllers. No matter how good the visual and audio simulation there will still be a divide in what is experienced in the virtual world and the feedback current controllers provide.
Videos
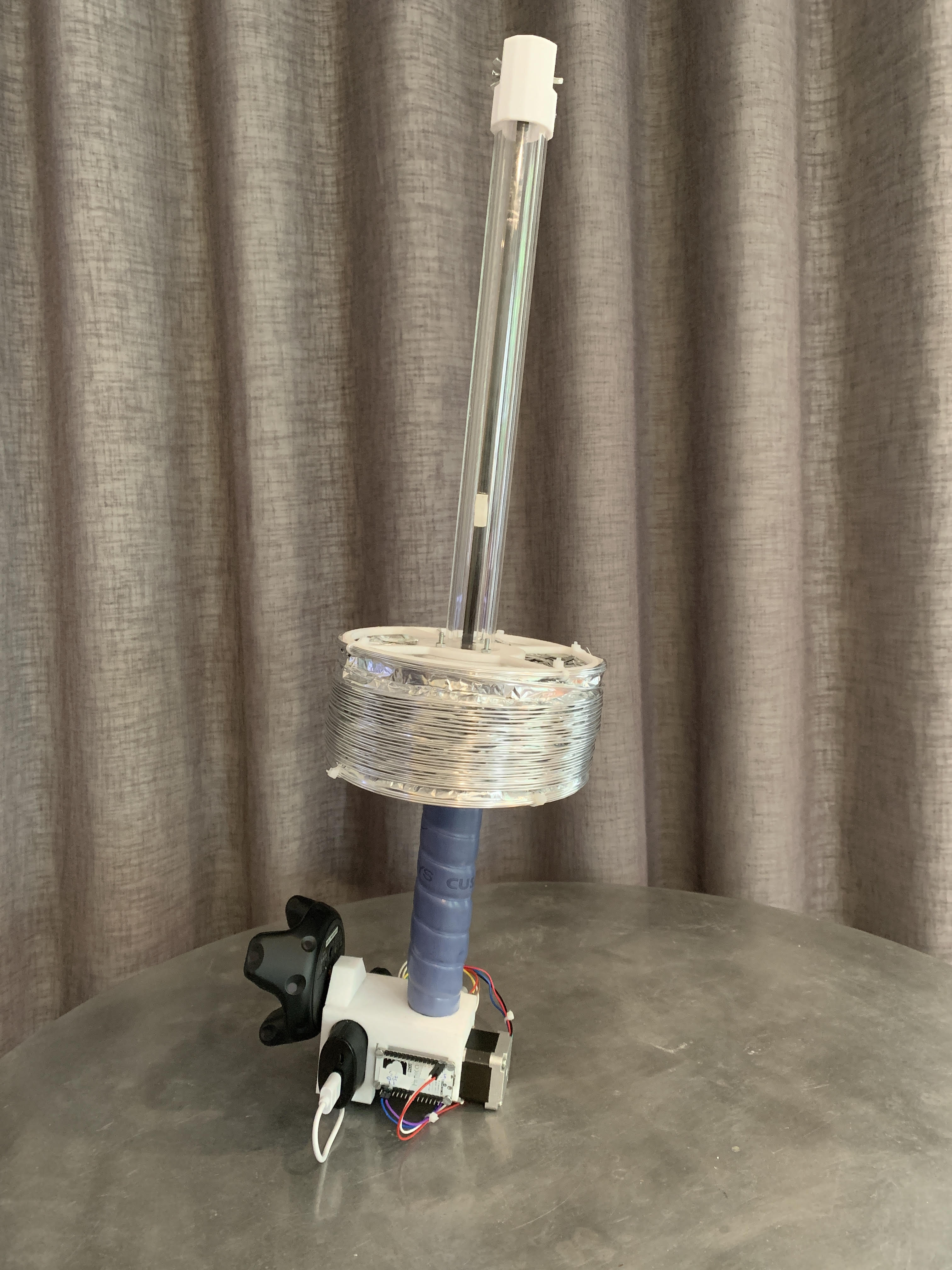
Images